«Трудно разработать единый мягкий захват, способный работать со сверхмягкими, сверхтонкими и тяжелыми объектами одновременно из-за необходимости соблюдать баланс между силой, точностью и аккуратностью, - сказал Инь Цзе из Университета Северной Каролины, один из исследователей. – Наша конструкция достигла превосходного баланса этих характеристик».
Добиться такой универсальности инженерам-робототехникам помогло японское искусство киригами, https://newatlas.com/robotics/novel-kirigami-inspired-roboti... New Atlas. Оно заключается в умении сложить лист бумаги и сделать в нем надрезы и отверстия таким образом, чтобы получилась сложная трехмерная форма, например, дом, цветок или животное.
«Сила захватов роботов обычно измеряется в отношении грузоподъемности к весу, - сказал Инь. – Наши захваты весят 0,4 грамма и могут поднять до 6,4 кг. Отношение грузоподъемности к весу составляет около 16 000. В сочетании с характеристиками аккуратности и точности, сила захватов указывает на большой потенциал применения».
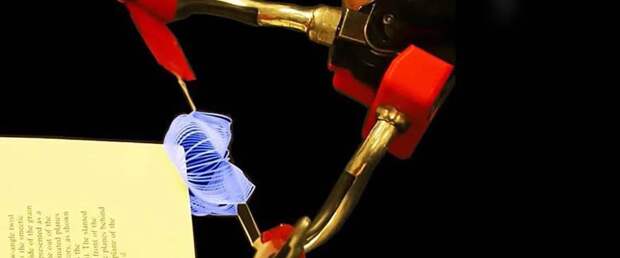
По мнению исследователей, такие показатели – следствие проектирования, а не выбора материалов для захватов. Другими словами, можно изготавливать их хоть из биоразлагаемых материалов, например, прочных листьев. В качестве демонстрации метода они соединили захваты с миоэлектрическим протезом, который переворачивал страницы и срывал виноград с лозы.
Clone Robotics собирается обеспечить рынок андроидов самыми человекоподобными верхними конечностями. Какие задачи они будут выполнять — не ясно, но наблюдать за движением искусственных костей и мышц под прозрачной кожей весьма приятно и поучительно.
Свежие комментарии